




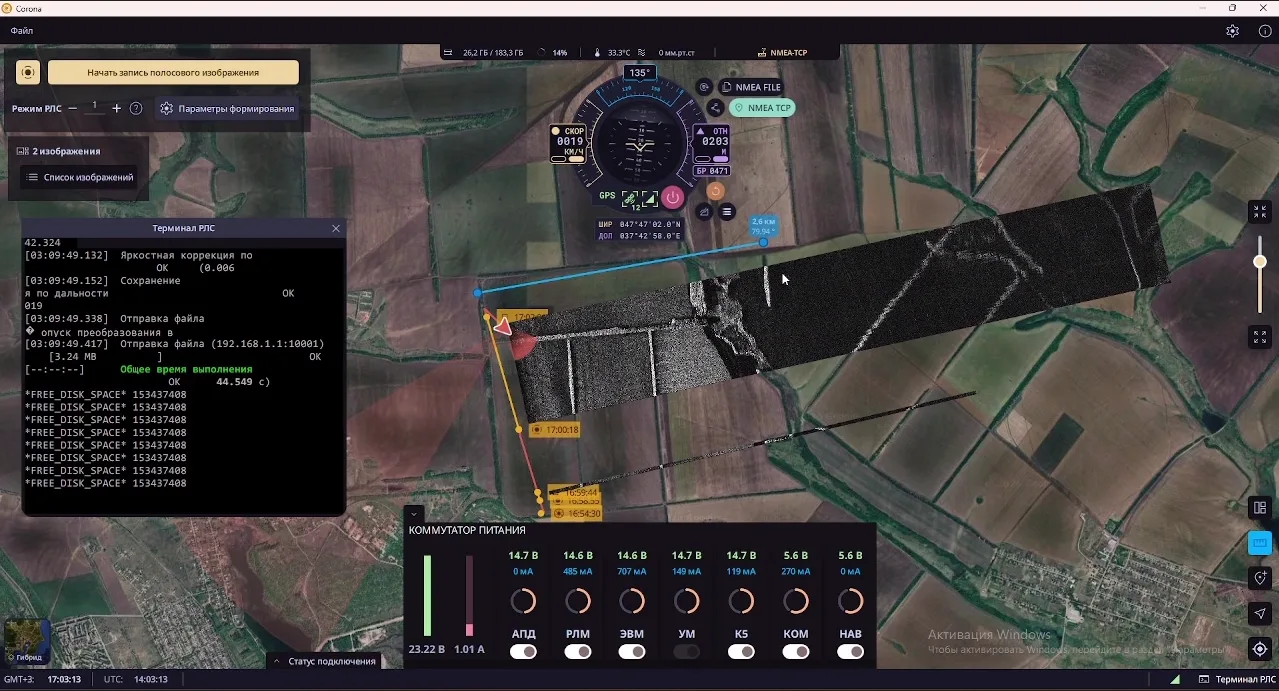
«Квазар» — это программно-аппаратный комплекс, состоящий из малогабаритной радиолокационной станции с синтезированной апертурой антенны и наземной станции управления, обеспечивающей управление режимами работы радиолокационной станции, прием, обработку и автоматическую геопривязку сформированных радиолокационных изображений на географической подложке в реальном времени.
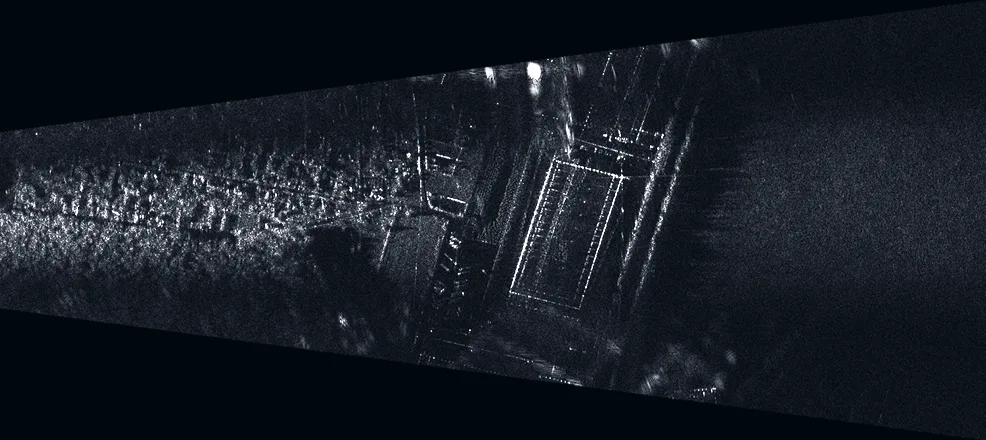
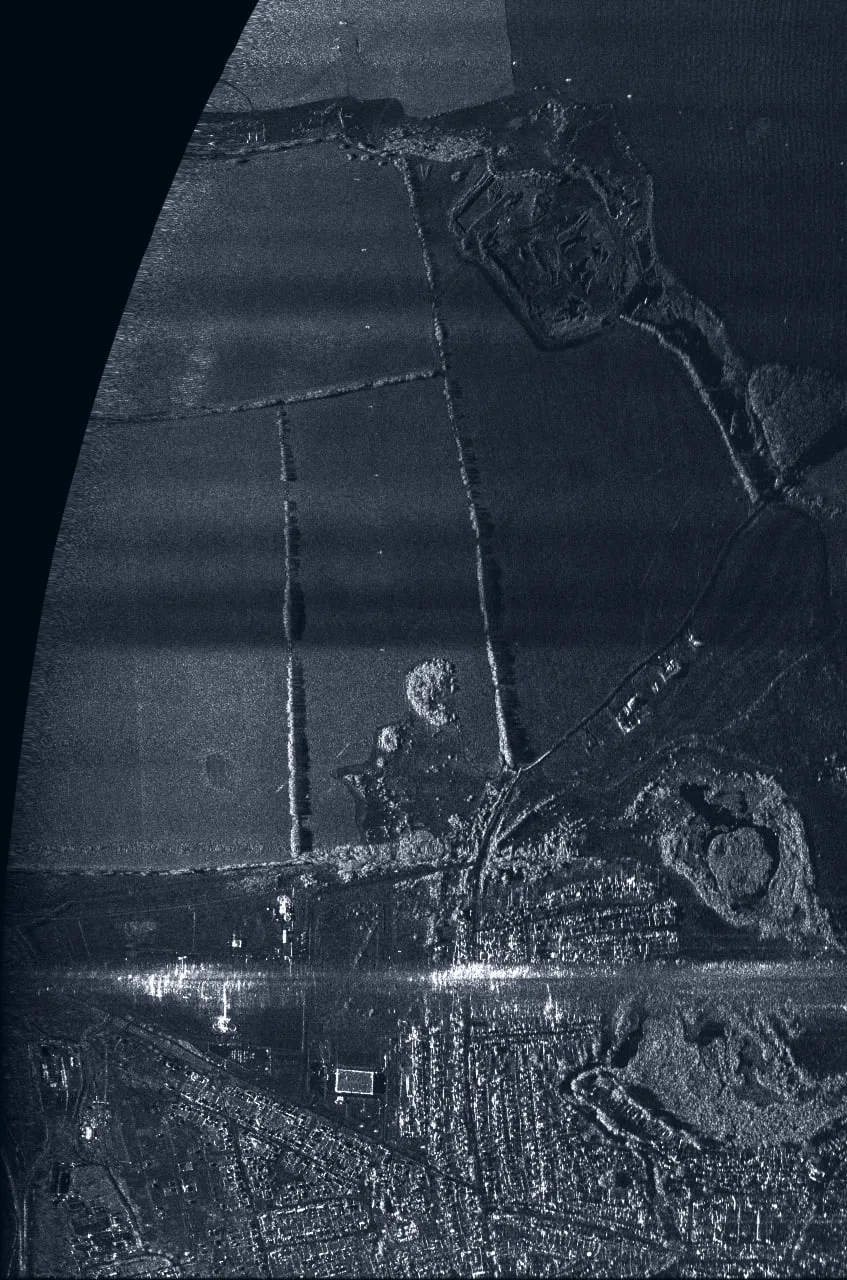
Комплекс предназначен для формирования высокодетальных радиолокационных изображений участков земной поверхности вне зависимости от условий освещенности и состояния атмосферы (туман, облачность, осадки).
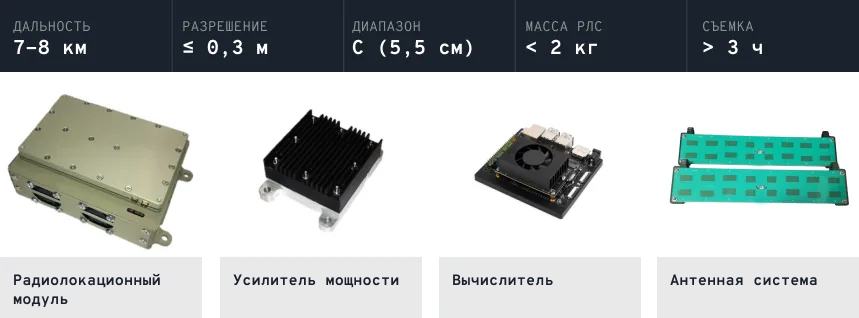
В качестве носителей РЛС могут выступать пилотируемые и беспилотные летательные аппараты самолетного и вертолетного типов, а также мультикоптеры с массой полезной нагрузки более 2 кг.






В телескопическом режиме изображение формируется в пределах луча диаграммы направленности антенны. Это позволяет достичь максимальной разрешающей способности, однако охват изображения ограничен поверхностью, захватываемой лучом диаграммы направленности антенны радара.
Изображение формируется непрерывно по мере движения носителя («склеивается» из полос). Режим обеспечивает широкий охват земной поверхности на протяжении всего маршрута при сохранении стабильного качества детализации.

Видеорежим реализован в виде покадрового синтезирования телескопических радиолокационных изображений с временной выборкой: каждый кадр синтезируется независимо из скользящего временного окна голограммы. Результат кодируется в H.265/HEVC через FFmpeg с настраиваемыми параметрами качества (CRF 18–28) и частотой до 120 кадров/сек.
В состав комплекса интегрирован модуль распознавания объектов на базе нейросети YOLO11 OBB. В отличие от стандартных детекторов, OBB-модель учитывает угол поворота объектов, что критически важно для радиолокационных снимков.
Модуль распознавания автоматически маркирует на радиолокационном изображении объекты (например, технику, транспортные средства, строения).

Программный комплекс спроектирован как кроссплатформенное решение с акцентом на встраиваемые системы и успешно функционирует на широком спектре устройств.
Целевая платформа комплекса. Проект оптимизирован для работы на модулях NVIDIA, обеспечивая максимальную производительность на ватт при обработке радиолокационных данных в полевых условиях. Поддерживаются:
Особенности: полная поддержка аппаратного ускорения через NVIDIA CUDA (архитектура sm_87/compute_87) и использование специализированных кодеков для мультиплексирования видеопотока.
Несмотря на отсутствие аппаратного ускорения на этих платформах, высокая эффективность параллельных вычислений на ЦП позволяет использовать программный комплекс на таких одноплатных компьютерах как, например, Raspberry Pi 4/5.
Для сравнения выбрано время формирования полосового радиолокационного изображения участка местности размером 3,000 × 4,529 м.
| Платформа | Режим | Время |
|---|---|---|
| Jetson Orin AGX | GPU (CUDA) | 35.2 с |
| Jetson Orin NX | GPU (CUDA) | 48.1 с |
| Jetson Orin Nano | GPU (CUDA) | 48.3 с |
| ПК (RTX 5070, AMD Ryzen 5 7600) | GPU (CUDA) | 14.0 с |
| ПК (RTX 5070, AMD Ryzen 5 7600) | CPU (12 потоков) | 39.8 с |
| Raspberry Pi 5 | CPU (4 потока) | 116.5 с |