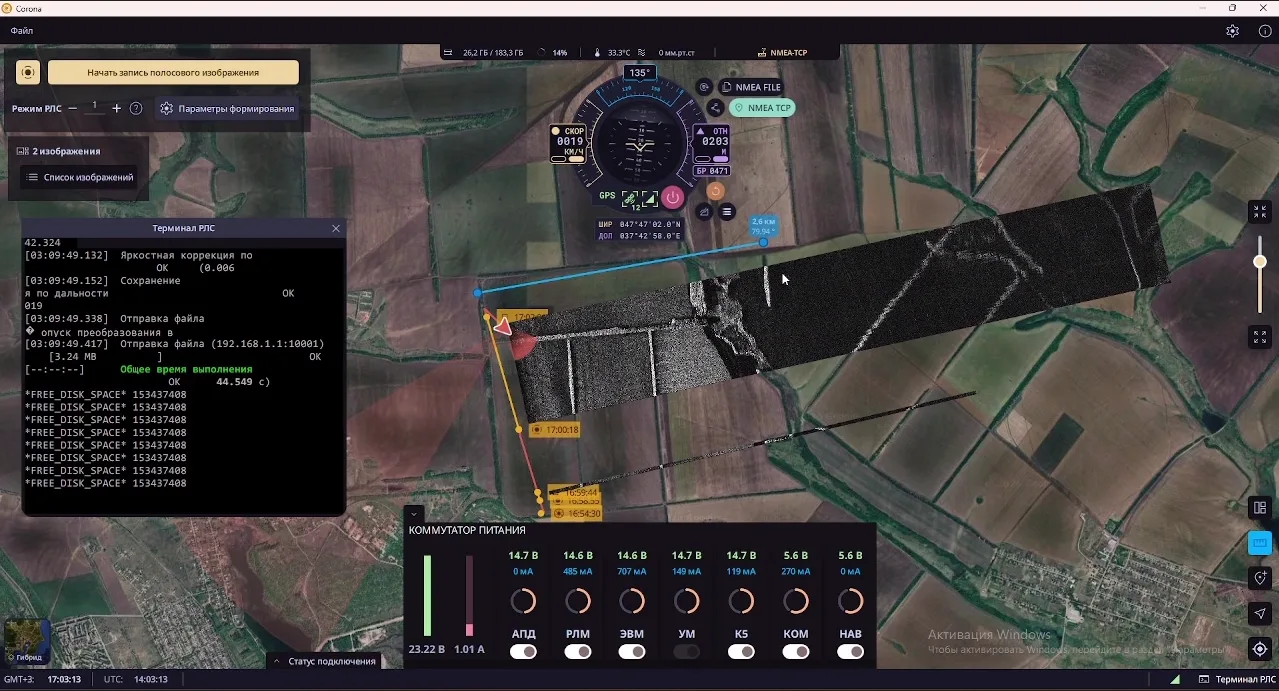
QuaSAR is a software and hardware system consisting of a compact synthetic aperture radar station and a ground control station. The ground station controls radar operating modes, receives and processes radar data, and automatically georeferences generated radar images on a geographic basemap in real time.
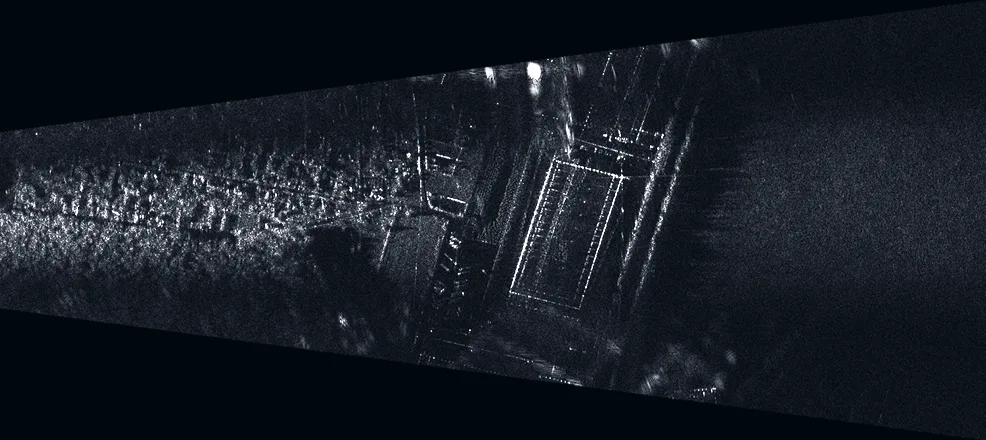
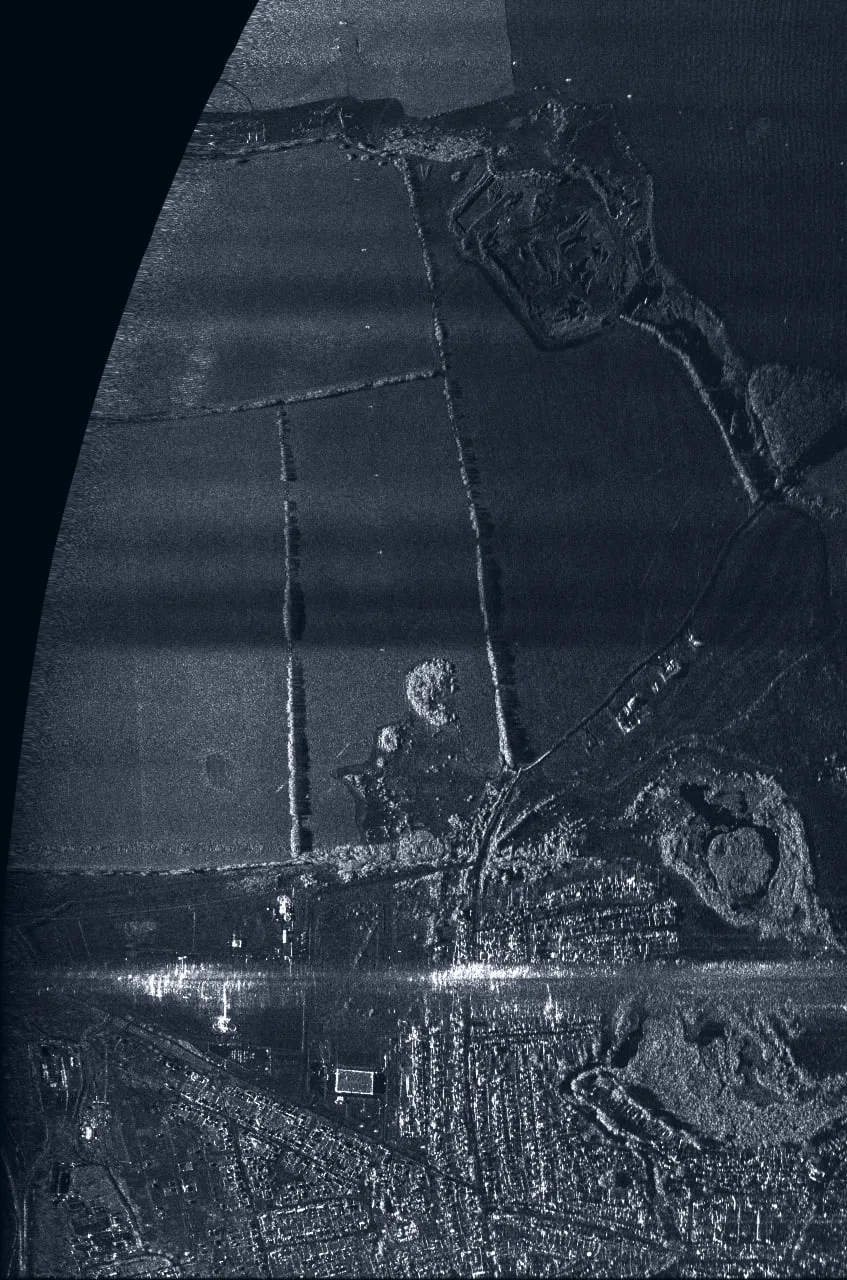
The system is designed to generate high-detail radar images of terrain areas regardless of illumination and atmospheric conditions, including fog, cloud cover, and precipitation.
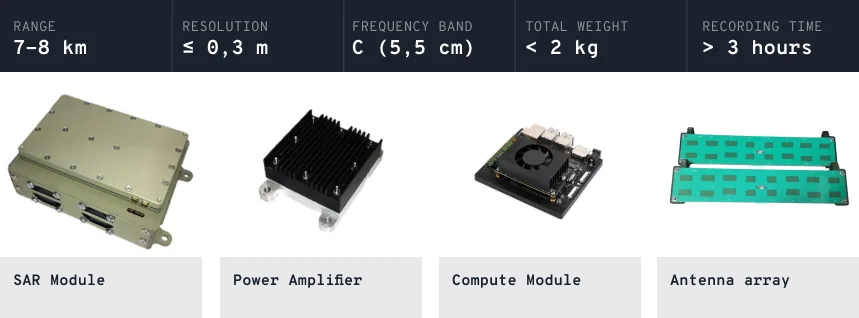
The radar can be carried by crewed and uncrewed fixed-wing aircraft, helicopters, and multicopters with payload capacity above 2 kg.






In spotlight mode, the image is formed within the antenna beam. This provides maximum resolution, while the image coverage is limited to the area captured by the radar antenna beam.
The image is formed continuously as the carrier moves, by stitching strips together. This mode provides wide terrain coverage throughout the route while maintaining stable detail quality.

Video mode is implemented as frame-by-frame synthesis of spotlight radar images with temporal sampling: each frame is synthesized independently from a sliding time window of the hologram. The result is encoded in H.265/HEVC through FFmpeg with configurable quality parameters (CRF 18-28) and a frame rate of up to 120 fps.
The system includes an object recognition module based on the YOLO11 OBB neural network. Unlike standard detectors, the OBB model accounts for object rotation angle, which is critical for radar imagery.
The recognition module automatically labels objects in radar images, such as equipment, vehicles, and buildings.

The software package is designed as a cross-platform solution with a focus on embedded systems and runs successfully on a wide range of devices.
This is the system’s target platform. The project is optimized for NVIDIA modules, providing maximum performance per watt when processing radar data in field conditions. Supported modules:
Features: full hardware acceleration support through NVIDIA CUDA (sm_87/compute_87 architecture) and use of specialized codecs for video stream multiplexing.
Although these platforms lack hardware acceleration, efficient parallel CPU computation allows the software package to run on single-board computers such as Raspberry Pi 4/5.
The comparison uses the time required to generate a stripmap radar image of a 3,000 x 4,529 m terrain area.
| Platform | Mode | Runtime |
|---|---|---|
| Jetson Orin AGX | GPU (CUDA) | 35.2 s |
| Jetson Orin NX | GPU (CUDA) | 48.1 s |
| Jetson Orin Nano | GPU (CUDA) | 48.3 s |
| PC (RTX 5070, AMD Ryzen 5 7600) | GPU (CUDA) | 14.0 s |
| PC (RTX 5070, AMD Ryzen 5 7600) | CPU (12 threads) | 39.8 s |
| Raspberry Pi 5 | CPU (4 threads) | 116.5 s |




